Project Page
Sparse Voxel Octree Pathfinding
High-performance 3D pathfinding system using sparse voxel octrees for large environments.
Key Highlights
- True 3D pathfinding that supports flying agents and fully vertical levels
- Adaptive spatial index that uses fine detail near obstacles and coarse cells in open space
- Graph is precomputed up front so runtime queries stay cheap
Adaptive World Index
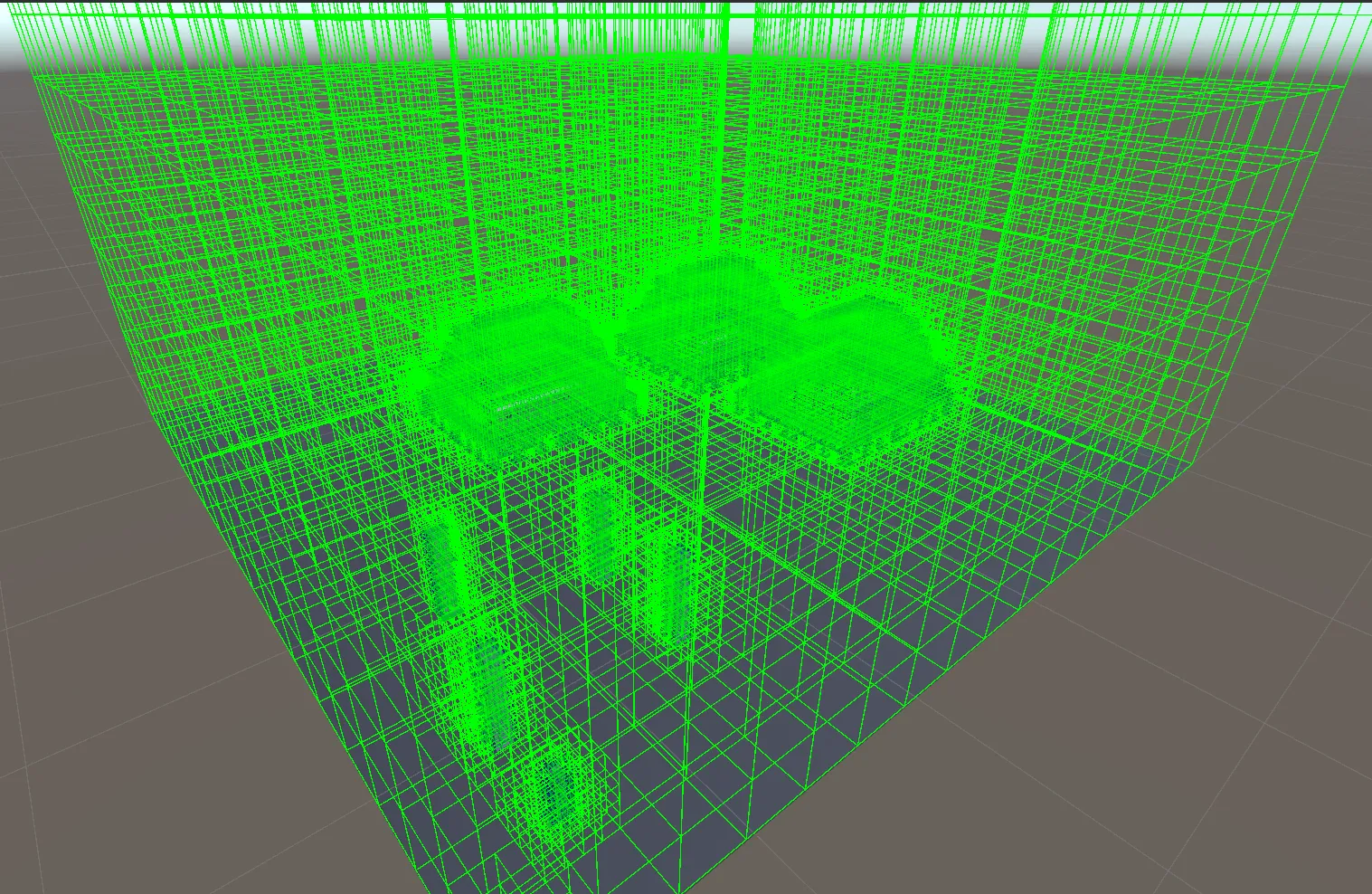
- Subdivides the world automatically based on level geometry, with no manual setup or hand-placed waypoints
- Configurable resolution limits trade off path precision against memory and build time
Robust Pathfinding
- A* search returns a usable path even when the start or goal lands inside or outside geometry
- Agent clearance is applied at the destination so units stop at a safe point instead of clipping into walls
Why This Matters
- Solves navigation cases that flat, ground-based solutions can’t
- Clean split between build, query, and runtime layers makes it drop-in reusable across projects